Что такое шим контроллер, как он устроен и работает, виды и схемы. ШИМ — широтно-импульсная модуляция Примеры реальных устройств
8. Широтно-импульсная модуляция в преобразователях
8.1. Общие сведения
Принципы импульсного управления и модуляции рассмотрены в гл. 4 на примере простейшей схемы регулятора постоянного тока. При этом даны определения основных видов импульсной модуляции, используемых в теории линейных импульсных систем, которые соответствуют практике управления импульсными преобразователями постоянного тока.
Однако широтно-импульсная модуляция напряжений или токов в преобразователях переменного тока имеет в силовой электронике несколько иное определение, учитывающее особенности ШИМ при решении задач преобразования электроэнергии на переменном токе. Согласно определению МЭК 551-16-30, широтно- импульсной модуляцией называется импульсное управление, при котором ширина или частота импульсов или и та и другая модулируются в пределах периода основной частоты для того, чтобы создать определенную форму кривой выходного напряжения. В большинстве случаев ШИМ осуществляется в целях обеспечения синусоидальности напряжения или тока, т. е. снижения уровня высших гармоник относительно основной (первой) гармоники, и называется синусоидальной. Различают следующие основные методы обеспечения синусоидальности: аналоговая ШИМ и ее модификации; избирательное (селективное) подавление высших гармоник; гистерезисная или дельта-модуляция;
модуляция пространственного вектора.
Классическим вариантом организации аналоговой синусоидальной ШИМ является изменение ширины импульсов, формирующих выходное напряжение (ток) посредством сравнения сигнала напряжения заданной формы, называемого опорным или эталонным, с сигналом напряжения треугольной формы, имеющим более высокую частоту и называемым несущим сигналом. Опорный сигнал является модулирующим и определяющим требуемую форму выходного напряжения (тока). Существует много модификаций этого метода, в которых модулирующие сигналы представлены специальными функциями, отличными от синусоиды. В конспекте лекций будет рассмотрено несколько основных схем поясняющих эти методы ШИМ.
Метод избирательного подавления высших гармоник в настоящее время успешно реализуется средствами микропроцессорных контроллеров на основе программного обеспечения. Гистерезисная модуляция основана на принципах релейного «слежения» за опорным сигналом, например, синусоидальной формы. В простейшем техническом исполнении этот метод сочетает принципы ШИМ и ЧИМ (частотно-импульсной модуляции). Однако посредством специальных схемотехнических мер можно стабилизировать частоту модуляции или ограничить диапазон ее изменения.
Метод модуляции пространственного вектора основан на преобразовании трехфазной системы напряжения в двухфазную и получении обобщенного пространственного вектора. Величина этого вектора рассчитывается в моменты, определяемые основной и модулирующей частотами. Он считается весьма перспективным для управления трехфазными инверторами, в частности, при использовании их в электроприводе. В то же время он во многом сходен с традиционной синусоидальной ШИМ.
Системы управления на основе ШИМ позволяют не только обеспечить синусоидальную форму усредненных значений основной гармоники напряжения или тока, но и управлять значениями ее амплитуды, частоты и фазы. Так как в этих случаях в преобразователе используются полностью управляемые ключи, то становится возможным реализовать работу преобразователей переменного (постоянного) тока совместно с сетью переменного тока во всех четырех квадрантах в режимах как выпрямления, так и инвертирования с любым заданным значением коэффициента мощности основной гармоники cosφ в диапазоне от -1 до 1. Более того, с увеличением несущей частоты расширяются возможности воспроизведения на выходе инверторов тока и напряжения заданной формы. Это позволяет создавать активные фильтры для подавления высших гармоник.
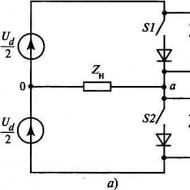
Основные определения, используемые при дальнейшем изложении, рассмотрим на примере применения первого метода в однофазной полу мостовой схеме инвертора напряжения (рис. 8.1, а ). В этой условной схеме ключи S 1 и S 2 представлены полностью управляемыми коммутационными элементами, дополненными последовательно и параллельно соединенными с ними диодами. Последовательные диоды отражают однонаправленную проводимость ключей (например, транзисторов или тиристоров), а параллельные обеспечивают проводимость обратных токов при активно-индуктивной нагрузке.
Диаграммы опорного, модулирующего u M (θ) и несущего u H (θ) сигналов приведены на рис. 8.1, б . Формирование импульсов управления ключами S 1 и S 2 осуществляется по следующему принципу. При u M (θ) > u H (θ) ключ S 1 включен, a S 2 выключен. При u M (θ) < u H (θ) состояния ключей изменяются на противоположные: S 2 - включен, a S 1 - выключен. Таким образом, на выходе инвертора формируется напряжение в виде двух полярных импульсов. В реальных схемах для исключения одновременной проводимости ключей S 1 и S 2 следует предусматривать определенную задержку между моментами формирования сигналов на включение этих ключей. Очевидно, что ширина импульсов зависит от соотношения амплитуд сигналов u M (θ) и u H (θ). Параметр, характеризующий это соотношение, называется индексом амплитудной модуляции и определяется по формуле (8.1):
, (8.1.)
где U M m и U H m - максимальные значения модулирующего сигнала u M (θ) и несущего сигнала u H (θ) соответственно.


Рис. 8.1. Однофазный полу мостовой инвертор напряжения: а – схема; б – диаграммы напряжения при импульсной модуляции
Частота несущего сигнала u H (θ) равна частоте коммутации f H ключей S 1 и S 2 и обычно значительно превышает частоту модулирующего сигнала f M . Соотношение частот f H и f M является важным показателем эффективности процесса модуляции и называется индексом частотной модуляции, который определяется по формуле (8.2):
При малых значениях M f сигналы u M (θ) и u H (θ) должны быть синхронизированы, чтобы избежать появления нежелательных субгармоник. В в качестве максимального значения My , определяющего необходимость синхронизации, устанавливается М f = 21. Очевидно, что при синхронизированных сигналах и коэффициент M f является постоянной величиной.
Из диаграммы на рис. 8.1 видно, что амплитуда первой гармоники выходного напряжения U am 1 может быть с учетом (8.1) представлена в следующем виде (8.3):
![]() (8.3)
(8.3)
Согласно (8.3) при М a = 1 амплитуда первой гармоники выходного напряжения равна высоте прямоугольника полуволн U d /2. Характерная зависимость относительного значения первой гармоники выходного напряжения от значения М a представлена на рис. 8.2, из которого видно, что изменение М a от 0 до 1 линейно и зависит от амплитуды U am 1 . Предельное значение величины М a определяется принципом рассматриваемого вида модуляции, согласно которому максимальное значение U am 1 ограничено высотой полуволны прямоугольной формы, равной U d /2. При дальнейшем увеличении коэффициента М a модуляция приводит к нелинейному возрастанию амплитуды U am 1 до максимального значения, определяемого формированием на выходе инвертора напряжения прямоугольной формы, которое в дальнейшем остается неизменным.
Разложение прямоугольной функции в ряд Фурье дает максимальное значение (8.4):
![]() (8.4)
(8.4)
Эта величина ограничивается значением индекса М а, изменяющегося в диапазоне от 0 до примерно 3. Очевидно, что функция на интервале а-б значений от 1 до 3,2 является нелинейной (рис. 8.2). Режим работы на этом участке называется сверх модуляцией.
Значение M f определяется выбором частоты несущего сигнала u H (θ) и существенно влияет на технические характеристики преобразователя. С ростом частоты увеличиваются коммутационные потери в силовых ключах преобразователей, но при этом улучшается спектральный состав выходного напряжения и упрощается решение задачи фильтрации высших гармоник, обусловленных процессом модуляции. Важным фактором выбора значения f H во многих случаях является необходимость обеспечения его значения в звуковом диапазоне частоты более 20 кГц. При выборе f H следует также учитывать уровень рабочих напряжений преобразователя, его мощность и другие параметры.

Рис. 8.2. Зависимость относительного значения амплитуды основной гармоники выходного напряжения от индекса амплитудной модуляции для однофазной полу мостовой схемы
Общей тенденцией здесь является рост значений M f преобразователей малой мощности и низких напряжений и наоборот. Поэтом выбор M f является многокритериальной оптимизационной задачей.
Импульсная модуляция со стохастическим процессом . Использование ШИМ в преобразователях связано с появлением высших гармоник в модулируемых напряжениях и токах. При этом в спектральном составе этих параметров наиболее значительные гармоники возникают на частотах, кратных индексу частотной модуляции M f и сгруппированных около них на боковых частотах гармоник с убывающими амплитудами. Высшие гармоники могут порождать следующие основные проблемы:
возникновение акустических шумов;
ухудшение электромагнитной совместимости (ЭМС) с другими электротехническими устройствами или системами.
Основными источниками акустических шумов являются электромагнитные компоненты (дроссели и трансформаторы), на которые воздействуют ток и напряжение, содержащие высшие гармоники с частотами звукового диапазона. Следует отметить, что шумы могут возникать на определенных частотах, где высшие гармоники имеют максимальное значение. Факторы, вызывающие шумы, например явление магнитострикции, усложняют разрешение проблемы ЭМС. Проблемы с ЭМС могут возникать в широком частотном диапазоне в зависимости от критичности к уровню электромагнитных помех электротехнических устройств. Традиционно для снижения уровня шумов использовались конструктивные и технологические решения, а для обеспечения ЭМС применялись пассивные фильтры.
В качестве перспективного направления решения этих проблем рассматриваются методы, связанные с изменением характера спектрального состава модулируемых напряжений и токов. Сущность этих методов состоит в выравнивании частотного спектра и снижении амплитуды явно выраженных гармоник за счет стохастического их распределения в широком частотном диапазоне. Такой прием иногда называется «размазыванием» частотного спектра. Концентрация энергии помех уменьшается на частотах, где гармоники могут иметь максимальные значения. Реализация этих методов не связана с воздействием на компоненты силовой части преобразователей и в большинстве случаев ограничена программными средствами с незначительным изменением системы управления.
Рассмотрим кратко принципы реализации этих методов. В основе ШИМ лежит изменение коэффициента заполнения γ= t и / T n , где t и - длительность импульса; Т n - период его формирования. Обычно эти величины, а также положение импульса на интервале периода Т n являются постоянными в установившихся режимах. Результаты ШИМ определяются как интегральные усредненные значения. В этом случае детерминированные значения t и и включая положение импульса, обусловливают неблагоприятный спектральный состав модулируемых параметров. Если этим величинам придать случайный характер при сохранении заданного значения γ, то процессы становятся стохастическими и спектральный состав модулируемых параметров изменяется. Например, такой случайный характер можно придать положению импульса t и на интервале периода Т n или обеспечить стохастическое изменение последнего. Для этой цели может использоваться генератор случайных чисел, воздействующий на задающий генератор частоты модуляции f n =1/T n . Аналогичным образом можно изменять положение импульса на интервале Т n с математическим ожиданием, равным нулю. Усредненное интегральное значение γ должно оставаться на заданном системой регулирования уровне, в результате чего будет реализовано выравнивание спектрального состава высших гармоник в модулируемых напряжениях и токах.
Вопросы для самоконтроля
1. Перечислите основные методы ШИМ для обеспечения синусоидальности тока или напряжения.
2. В чем отличие однополярной модуляции напряжения от двухполярной?
3. Перечислите основные параметры ШИМ.
4. С какой целью используется ШИМ со стохастическими процессами?
Широтно-импульсная модуляция (ШИМ) – это метод преобразования сигнала, при котором изменяется длительность импульса (скважность), а частота остаётся константой. В английской терминологии обозначается как PWM (pulse-width modulation). В данной статье подробно разберемся, что такое ШИМ, где она применяется и как работает.
Область применения
С развитием микроконтроллерной техники перед ШИМ открылись новые возможности. Этот принцип стал основой для электронных устройств, требующих, как регулировки выходных параметров, так и поддержания их на заданном уровне. Метод широтно-импульсной модуляции применяется для изменения яркости света, скорости вращения двигателей, а также в управлении силовым транзистором блоков питания (БП) импульсного типа.
Широтно-импульсная (ШИ) модуляция активно используется в построении систем управления яркостью светодиодов. Благодаря низкой инерционности, светодиод успевает переключаться (вспыхивать и гаснуть) на частоте в несколько десятков кГц. Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана .
Подаваемое на вход микросхемы драйвера сетевое напряжение постоянно сравнивается с внутрисхемным опорным напряжением, формируя на выходе сигнал ШИМ (ЧИМ), параметры которого задаются внешними резисторами. Некоторые микросхемы имеют вывод для подачи аналогового или цифрового сигнала управления. Таким образом, работой импульсного драйвера можно управлять с помощью другого ШИ-преобразователя. Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Масштабное применение ШИМ отражено во всех LCD панелях со светодиодной подсветкой. К сожалению, в LED мониторах большая часть ШИ-преобразователей работает на частоте в сотни Герц, что негативно отражается на зрении пользователей ПК.
Микроконтроллер Ардуино тоже может функционировать в режиме ШИМ контроллера. Для этого следует вызвать функцию AnalogWrite() с указанием в скобках значения от 0 до 255. Ноль соответствует 0В, а 255 – 5В. Промежуточные значения рассчитываются пропорционально.
Повсеместное распространение устройств, работающих по принципу ШИМ, позволило человечеству уйти от трансформаторных блоков питания линейного типа. Как результат – повышение КПД и снижение в несколько раз массы и размеров источников питания.
ШИМ-контроллер является неотъемлемой частью современного импульсного блока питания. Он управляет работой силового транзистора, расположенного в первичной цепи импульсного трансформатора. За счёт наличия цепи обратной связи напряжение на выходе БП всегда остаётся стабильным. Малейшее отклонение выходного напряжения через обратную связь фиксируется микросхемой, которая мгновенно корректирует скважность управляющих импульсов. Кроме этого современный ШИМ-контроллер решает ряд дополнительных задач, способствующих повышению надёжности источника питания:
- обеспечивает режим плавного пуска преобразователя;
- ограничивает амплитуду и скважность управляющих импульсов;
- контролирует уровень входного напряжения;
- защищает от короткого замыкания и превышения температуры силового ключа;
- при необходимости переводит устройство в дежурный режим.
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов. Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства. Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Пример использования ШИМ регулятора
Один из вариантов реализации ШИМ простого регулятора уже описывался ранее в . Он построен на базе микросхемы и имеет небольшую обвязку. Но, несмотря на простату схемы, регулятор имеет довольно широкую область применения: схемы управления яркости светодиодов, светодиодных лент, регулировка скорость вращения двигателей постоянного тока.
Читайте так же
На форуме достаточно часто встречаются вопросы по реализации Широтно Импульсной Модуляции на микроконтроллерных устройствах. Я и сам очень много спрашивал по этому поводу и, разобравшись, решил облегчить труд новичкам в этой области, так как информации в сети много и рассчитана она на разработчиков разного уровня, а сам я только- только в нем разобрался и память ещё свежа.
Так как для меня самым важным было применение ШИМ именно для управления яркостью светодиодов, то именно их я и буду использовать в примерах. В качестве микроконтроллера будем использовать горячо любимый ATmega8.
Для начала вспомним, что такое ШИМ. ШИМ сигнал - это импульсный сигнал определенной частоты и скважности:
Частота, это количество периодов за одну секунду. Скважность- отношение длительности импульса к длительности периода. Можно изменять и то и другое, но для управления светодиодами достаточно управлять скважностью. На картинке выше мы видим ШИМ сигнал со скважностью 50 %, так как длительность импульса (ширина импульса) ровно половина от периода. Соответственно светодиод будет ровно половину времени во включенном состоянии и половину в выключенном. Частота ШИМ очень большая и глаз не заметит мерцания светодиода из за инерционности нашего зрения, поэтому нам будет казаться, что светодиод светится на половину яркости. Если мы изменим скважность на 75%, то яркость светодиода будет на 3 четверти от полной, а график будет выглядеть так:

Получается, что мы можем регулировать яркость светодиода от 0 до 100 %. А теперь поговорим о таком параметре ШИМ, как разрешение. Разрешение- это количество градаций (шагов) регулировки скважности, мы будем рассматривать разрешение в 256 шагов.
С параметрами вроде разобрались, теперь поговорим о том, как нам получить этот самый ШИМ от микроконтроллера. Берем остро заточенный разогретый паяльник и начинаем пытать МК, одновременно подцепившись к двум его ногам осциллографом и проверяя наличие на них сигнала нужной нам скважности. В микроконтроллерах есть аппаратная поддержка ШИМ и несколько каналов для него, в нашем случае 3. За выдачу ШИМ отвечают определенные выводы МК, в нашем случае OC2, OC1A, OC1B (15,16,17 нога в DIP корпусе). Так же для этого используются таймеры микроконтроллера, в нашем случае TC1, TC2. Так как же сконфигурировать МК для выдачи сигнала необходимой скважности? Все очень просто, для начала сконфигурируем нужные нам ноги на выход:
PORTB=0x00; DDRB=0x0E; // 0b00001110
Далее начнем конфигурировать таймеры. Для таймера TC1 нам потребуются два регистра: TCCR1A и TCCR1B. Открываем даташит и читаем как настраиваются эти регистры. Я настроил его на 8 битный сигнал ШИМ, что соответствует разрешению в 256 шагов:
TCCR1A=0xA1; TCCR1B=0x09;
Для таймера TC2 мы будем использовать регистр TCCR2=0x69;. Его настройка выглядит так:
TCCR2=0x69;
Всё, таймеры сконфигурированы. Скважность будем задавать регистрами OCR1A,OCR1B, OCR2:
Зададим требуемые скважности:
OCR1A=0x32; //50 шагов OCR1B=0x6A; //106 шагов OCR2=0xF0; //240 шагов
Ну и поместим инкремент и декремент этих регистров в бесконечный цикл:
While(1) { OCR1A++; OCR1B--; OCR2++; delay_ms(50); }
Первая тестовая программа готова и выглядит для CVAVR она так:
#include "mega8.h" #include "delay.h" void main(void) { PORTB=0x00; DDRB=0x0E; // 0b00001110 TCCR1A=0xA1; TCCR1B=0x09; TCCR2=0x69; OCR1A=0x32; //50 шагов OCR1B=0x6A; //106 шагов OCR2=0xF0; //240 шагов while (1) { OCR1A++; OCR1B--; OCR2++; delay_ms(50); }; }
Один из используемых подходов, позволяющих существенно сократить потери на нагревании силовых компонентов радиосхем, представляет собой использование переключательных режимов работы установок. При подобных системах электросиловой компонент или раскрыт - в это время на нем наблюдается фактически нулевое падение напряжения, или открыт - в это время на него подается нулевой ток. Рассеиваемую мощность можно вычислить, перемножив показатели силы тока и напряжения. В этом режиме получается достичь коэффициента полезного действия около 75-80% и более.
Что такое ШИМ?
Для получения на выходе сигнала требуемой формы силовой ключ должен открываться всего лишь на определенное время, пропорциональное вычисленным показателям выходного напряжения. В этом и заключается принцип широтно-импульсной модуляции (ШИМ, PWM). Далее сигнал такой формы, состоящий из импульсов, разнящихся по своей ширине, поступает в область фильтра на основе дросселя и конденсатора. После преобразования на выходе будет практически идеальный сигнал требуемой формы.
Область применения ШИМ не ограничивается импульсными источниками питания, стабилизаторами и преобразователями напряжения. Использование данного принципа при проектировании мощного усилителя звуковой частоты дает возможность существенно снизить потребление устройством электроэнергии, приводит к миниатюризации схемы и оптимизирует систему теплоотдачи. К недостаткам можно причислить посредственное качество сигнала на выходе.
Формирование ШИМ-сигналов
Создавать ШИМ-сигналы нужной формы достаточно трудно. Тем не менее индустрия сегодня может порадовать замечательными специальными микросхемами, известными как ШИМ-контроллеры. Они недорогие и целиком решают задачу формирования широтно-импульсного сигнала. Сориентироваться в устройстве подобных контроллеров и их использовании поможет ознакомление с их типичной конструкцией.
Стандартная схема контроллера ШИМ предполагает наличие следующих выходов:
- Общий вывод (GND). Он реализуется в виде ножки, которая подключается к общему проводу схемы питания устройства.
- Вывод питания (VC). Отвечает за электропитание схемы. Важно не спутать его с соседом с похожим названием - выводом VCC.
- Вывод контроля питания (VCC). Как правило, чип контроллера ШИМ принимает на себя руководство силовыми транзисторами (биполярными либо полевыми). В случае если напряжение на выходе снизится, транзисторы станут открываться лишь частично, а не целиком. Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.
Выходное управляющее напряжение (OUT)
Количество выводов микросхемы определяется её конструкцией и принципом работы. Не всегда удается сразу разобраться в сложных терминах, но попробуем выделить суть. Существуют микросхемы на 2-х выводах, управляющие двухтактными (двухплечевыми) каскадами (примеры: мост, полумост, 2-тактный обратный преобразователь). Существуют и аналоги ШИМ-контроллеров для управления однотактными (одноплечевыми) каскадами (примеры: прямой/обратный, повышающий/понижающий, инвертирующий).

Помимо этого, выходной каскад может быть по строению одно- и двухтактным. Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей "затвор - исток" и "затвор - сток". Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
ШИМ-контроллеры для большой мощности могут иметь также элементы управления выходным ключом (драйверы). В качестве выходных ключей рекомендуется использовать IGBT-транзисторы.
Основные проблемы ШИМ-преобразователей
При работе любого устройства полностью исключить вероятность поломки невозможно, и преобразователей это тоже касается. Сложность конструкции при этом не имеет значения, проблемы в эксплуатации может вызвать даже известный ШИМ-контроллер TL494. Неисправности имеют различную природу - некоторые из них можно выявить на глаз, а для обнаружения других требуется специальное измерительное оборудование.
Чтобы ШИМ-контроллер, следует ознакомится со списком основных неисправностей приборов, а лишь позже - с вариантами их устранения.
Диагностика неисправностей
Одна из часто встречающихся проблем - пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра.

Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
- Контроллер глохнет после старта - обрыв петли ОС, перепад по току, проблемы с конденсатором на выходе фильтра (если таковой имеется), драйвером; возможно, разладилось управление ШИМ-контроллером. Надо осмотреть устройство на предмет сколов и деформаций, замерить показатели нагрузки и сравнить их с типовыми.
- ШИМ-контроллер не стартует - отсутствует одно из входных напряжений или устройство неисправно. Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
- Напряжение на выходе отличается от номинального - проблемы с петлей ООС или с контроллером.
- После старта ШИМ на БП уходит в защиту при отсутствии КЗ на ключах - некорректная работа ШИМ или драйверов.
- Нестабильная работа платы, наличие странных звуков - обрыв петли ООС или цепочки RC, деградация емкости фильтра.
В заключение
Универсальные и многофункциональные ШИМ-контроллеры сейчас можно встретить практически везде. Они служат не только в качестве неотъемлемой составляющей блоков питания большинства современных устройств - типовых компьютеров и других повседневных девайсов. На основе контроллеров разрабатываются новые технологии, позволяющие существенно сократить расход ресурсов во многих отраслях человеческой деятельности. Владельцам частных домов пригодятся контроллеры заряда аккумуляторов от фотоэлектрических батарей, основанные на принципе широтно-импульсной модуляции тока заряда.
Высокий коэффициент полезного действия делает разработку новых устройств, действие которых основывается на принципе ШИМ, весьма перспективной. Вторичные источники питания - вовсе не единственное направление деятельности.
В некоторых случаях, например, в фонариках или домашних осветительных приборах, возникает необходимость регулировать яркость свечения. Казалось бы, чего уж проще: достаточно изменить ток через светодиод, увеличив или уменьшив . Но в этом случае на ограничительном резисторе будет расходоваться значительная часть энергии, что совсем недопустимо при автономном питании от батарей или аккумуляторов.
Кроме того, цвет свечения светодиодов будет изменяться: например, белый цвет при понижении тока меньше номинального (для большинства светодиодов 20мА) будет иметь несколько зеленоватый оттенок. Такое изменение цвета в ряде случаев совершенно ни к чему. Представьте себе, что эти светодиоды подсвечивают экран телевизора или компьютерного монитора.
В этих случаях применяется ШИМ - регулирование (широтно - импульсное) . Смысл его в том, что периодически зажигается и гаснет. При этом ток на протяжении всего времени вспышки остается номинальным, поэтому спектр свечения не искажается. Уж если светодиод белый, то зеленые оттенки появляться не будут.
К тому же при таком способе регулирования мощности потери энергии минимальны, КПД схем с ШИМ регулированием очень высок, достигает 90 с лишним процентов.
Принцип ШИМ - регулирования достаточно простой, и показан на рисунке 1. Различное соотношение времени зажженного и погашенного состояния на глаз воспринимается как : как в кино - отдельно показываемые поочередно кадры воспринимаются как движущееся изображение. Здесь все зависит от частоты проекции, о чем разговор будет чуть позже.

Рисунок 1. Принцип ШИМ - регулирования
На рисунке изображены диаграммы сигналов на выходе устройства управления ШИМ (или задающий генератор). Нулем и единицей обозначены : логическая единица (высокий уровень) вызывает свечение светодиода, логический нуль (низкий уровень), соответственно, погасание.
Хотя все может быть и наоборот, поскольку все зависит от схемотехники выходного ключа, - включение светодиода может осуществляться низким уровнем а выключение, как раз высоким. В этом случае физически логическая единица будет иметь низкий уровень напряжения, а логический нуль высокий.
Другими словами, логическая единица вызывает включение какого-то события или процесса (в нашем случае засвечивание светодиода), а логический нуль должен этот процесс отключить. То есть не всегда высокий уровень на выходе цифровой микросхемы является ЛОГИЧЕСКОЙ единицей, все зависит от того, как построена конкретная схема. Это так, для сведения. Но пока будем считать, что ключ управляется высоким уровнем, и по-другому просто быть не может.
Частота и ширина управляющих импульсов
Следует обратить внимание на то, что период следования импульсов (или частота) остается неизменным. Но, в общем, частота импульсов на яркость свечения влияния не оказывает, поэтому, к стабильности частоты особых требований не предъявляется. Меняется лишь длительность (ШИРИНА), в данном случае, положительного импульса, за счет чего и работает весь механизм широтно-импульсной модуляции.
Длительность управляющих импульсов на рисунке 1 выражена в %%. Это так называемый «коэффициент заполнения» или, по англоязычной терминологии, DUTY CYCLE. Выражается отношением длительности управляющего импульса к периоду следования импульсов.
В русскоязычной терминологии обычно используется «скважность» - отношение периода следования к времени импульс а. Таким образом если коэффициент заполнения 50%, то скважность будет равна 2. Принципиальной разницы тут нет, поэтому, пользоваться можно любой из этих величин, кому как удобней и понятней.
Здесь, конечно, можно было бы привести формулы для расчета скважности и DUTY CYCLE, но, чтобы не усложнять изложение, обойдемся без формул. В крайнем случае, закон Ома. Уж тут ничего не поделаешь: «Не знаешь закон Ома, сиди дома!». Если уж кого эти формулы заинтересуют, то их всегда можно найти на просторах Интернета.
Частота ШИМ для светорегулятора
Как было сказано чуть выше, особых требований к стабильности частоты импульсов ШИМ не предъявляется: ну, немного «плавает», да и ладно. Подобной нестабильностью частоты, кстати, достаточно большой, обладают ШИМ - регуляторы , что не мешает их применению во многих конструкциях. В данном случае важно лишь, чтобы эта частота не стала ниже некоторого значения.
А какая должна быть частота, и насколько она может быть нестабильна? Не забывайте, что речь идет о светорегуляторах. В кинотехнике существует термин «критическая частота мельканий». Это частота, при которой отдельные картинки, показываемые друг за другом, воспринимаются как движущееся изображение. Для человеческого глаза эта частота составляет 48Гц.
Вот именно по этой причине частота съемки на кинопленке составляла 24кадр/сек (телевизионный стандарт 25кадр/сек). Для повышения этой частоты до критической в кинопроекторах применяется двухлопастной обтюратор (заслонка) дважды перекрывающий каждый показываемый кадр.
В любительских узкопленочных 8мм проекторах частота проекции составляла 16кадр/сек, поэтому обтюратор имел аж три лопасти. Тем же целям в телевидении служит тот факт, что изображение показывается полукадрами: сначала четные, а потом нечетные строки изображения. В результате получается частота мельканий 50Гц.
Работа светодиода в режиме ШИМ представляет собой отдельные вспышки регулируемой длительности. Чтобы эти вспышки воспринимались на глаз как непрерывное свечение, их частота должна быть никак не меньше критической. Выше сколько угодно, но ниже никак нельзя. Этот фактор следует учитывать при создании ШИМ - регуляторов для светильников .
Кстати, просто, как интересный факт: ученые каким-то образом определили, что критическая частота для глаза пчелы составляет 800Гц. Поэтому кинофильм на экране пчела увидит как последовательность отдельных изображений. Для того, чтобы она увидела движущееся изображение, частоту проекции потребуется увеличить до восьмисот полукадров в секунду!
Для управления собственно светодиодом используется . В последнее время наиболее широко для этой цели используются , позволяющие коммутировать значительную мощность (применение для этих целей обычных биполярных транзисторов считается просто неприличным).
Такая потребность, (мощный MOSFET - транзистор) возникает при большом количестве светодиодов, например, при , о которых будет рассказано чуть позже. Если же мощность невелика - при использовании одного - двух светодиодов, можно использовать ключи на маломощных , а при возможности подключать светодиоды непосредственно к выходам микросхем.
На рисунке 2 показана функциональная схема ШИМ - регулятора. В качестве элемента управления на схеме условно показан резистор R2. Вращением его ручки можно в необходимых пределах изменять скважность управляющих импульсов, а, следовательно, яркость светодиодов.

Рисунок 2. Функциональная схема ШИМ - регулятора
На рисунке показаны три цепочки последовательно соединенных светодиодов с ограничивающими резисторами. Примерно такое же соединение применяется в светодиодных лентах. Чем длиннее лента, тем больше светодиодов, тем больше потребляемый ток.
Именно в этих случаях потребуются мощные , допустимый ток стока которых должен быть чуть больше тока, потребляемого лентой. Последнее требование выполняется достаточно легко: например, у транзистора IRL2505 ток стока около 100А, напряжение стока 55В, при этом, его размеры и цена достаточно привлекательны для использования в различных конструкциях.
Задающие генераторы ШИМ
В качестве задающего ШИМ - генератора может использоваться микроконтроллер (в промышленных условиях чаще всего), или схема, выполненная на микросхемах малой степени интеграции. Если в домашних условиях предполагается изготовить незначительное количество ШИМ - регуляторов, а опыта создания микроконтроллерных устройств нет, то лучше сделать регулятор на том, что в настоящее время оказалось под рукой.
Это могут быть логические микросхемы серии К561, интегральный таймер , а также специализированные микросхемы, предназначенные для . В этой роли можно заставить работать даже , собрав на нем регулируемый генератор, но это уж, пожалуй, «из любви к искусству». Поэтому, далее будут рассмотрены только две схемы: самая распространенная на таймере 555, и на контроллере ИБП UC3843.
Схема задающего генератора на таймере 555

Рисунок 3. Схема задающего генератора
Эта схема представляет собой обычный генератор прямоугольных импульсов, частота которого задается конденсатором C1. Заряд конденсатора происходит по цепи «Выход - R2 - RP1- C1 - общий провод». При этом на выходе должно присутствовать напряжение высокого уровня, что равнозначно, что выход соединен с плюсовым полюсом источника питания.
Разряжается конденсатор по цепи «C1 - VD2 - R2 - Выход - общий провод» в то время, когда на выходе присутствует напряжение низкого уровня, - выход соединен с общим проводом. Вот эта разница в путях заряда - разряда времязадающего конденсатора и обеспечивает получение импульсов с регулируемой шириной.
Следует заметить, что диоды, даже одного типа, имеют разные параметры. В данном случае играет роль их электрическая емкость, которая изменяется под действием напряжения на диодах. Поэтому вместе с изменением скважности выходного сигнала меняется и его частота.
Главное, чтобы она не стала меньше критической частоты, о которой было упомянуто чуть выше. Иначе вместо равномерного свечения с различной яркостью будут видны отдельные вспышки.
Приблизительно (опять же виноваты диоды) частоту генератора можно определить по формуле, показанной ниже.

Частота генератора ШИМ на таймере 555.
Если в формулу емкость конденсатора подставить в фарадах, сопротивление в Омах, то результат должен получиться в герцах Гц: от системы СИ никуда не денешься! При этом подразумевается, что движок переменного резистора RP1 находится в среднем положении (в формуле RP1/2), что соответствует выходному сигналу формы меандр. На рисунке 2 это как раз та часть, где указана длительность импульса 50%, что равнозначно сигналу со скважностью 2.
Задающий генератор ШИМ на микросхеме UC3843
Его схема показана на рисунке 4.

Рисунок 4. Схема задающего генератора ШИМ на микросхеме UC3843
Микросхема UC3843 является управляющим ШИМ - контроллером для импульсных блоков питания и применяется, например, в компьютерных источниках формата ATX. В данном случае типовая схема ее включения несколько изменена в сторону упрощения. Для управления шириной выходного импульса на вход схемы подается регулирующее напряжение положительной полярности, то на выходе получается импульсный сигнал ШИМ.
В простейшем случае регулирующее напряжение можно подать с помощью переменного резистора сопротивлением 22…100КОм. При необходимости можно управляющее напряжение получать, например, с аналогового датчика освещенности, выполненного на фоторезисторе: чем темнее за окном, тем светлее в комнате.
Регулирующее напряжение воздействует на выход ШИМ, таким образом, что при его снижении ширина выходного импульса увеличивается, что вовсе не удивительно. Ведь исходное назначение микросхемы UC3843 - стабилизация напряжения блока питания: если выходное напряжение падает, а вместе с ним и регулирующее напряжение, то надо принимать меры (увеличивать ширину выходного импульса) для некоторого повышения выходного напряжения.
Регулирующее напряжение в блоках питания вырабатывается, как правило, с помощью стабилитронов. Чаще всего это или им подобные.
При указанных на схеме номиналах деталей частота генератора около 1КГц, и в отличие от генератора на таймере 555, она при изменении скважности выходного сигнала не «плавает» - забота о постоянстве частоты импульсных блоков питания.
Чтобы регулировать значительную мощность, например, светодиодная лента, к выходу следует подключить ключевой каскад на транзисторе MOSFET, как было показано на рисунке 2.
Можно было бы и побольше рассказать о ШИМ - регуляторах, но пока остановимся на этом, а в следующей статье рассмотрим различные способы подключения светодиодов. Ведь не все способы одинаково хороши, есть такие, которых следует избегать, да и просто ошибок при подключении светодиодов случается предостаточно.
Статьи по теме